Validation of a palletizing solution in the automotive market
FEHST Componentes
May 21, 2026
In a recent feasibility study with FEHST Componentes, Augmented Labs was asked to simulate and validate a palletizing concept for an injection molding environment. The goal wasn’t to “make a nice robot animation”, it was to build a realistic process simulation that could answer a simple, but high-impact question:
Can the automation concept keep up with production requirements without becoming a bottleneck?
This article shares what we built, what we validated, and why simulation can be a reliable path to confident automation decisions, especially in early-stage concepts where changes are still easy and inexpensive. Due to confidentiality restrictions, the workpiece shown in this article is not the actual component used in the simulation.
The challenge: validate a concept before committing to integration
The starting point was clear:
- Injection machine output: 8 workpieces per batch
- Machine cycle time: aprox. 20 seconds (per batch)
- Part Blister Capacity: 14 workpieces
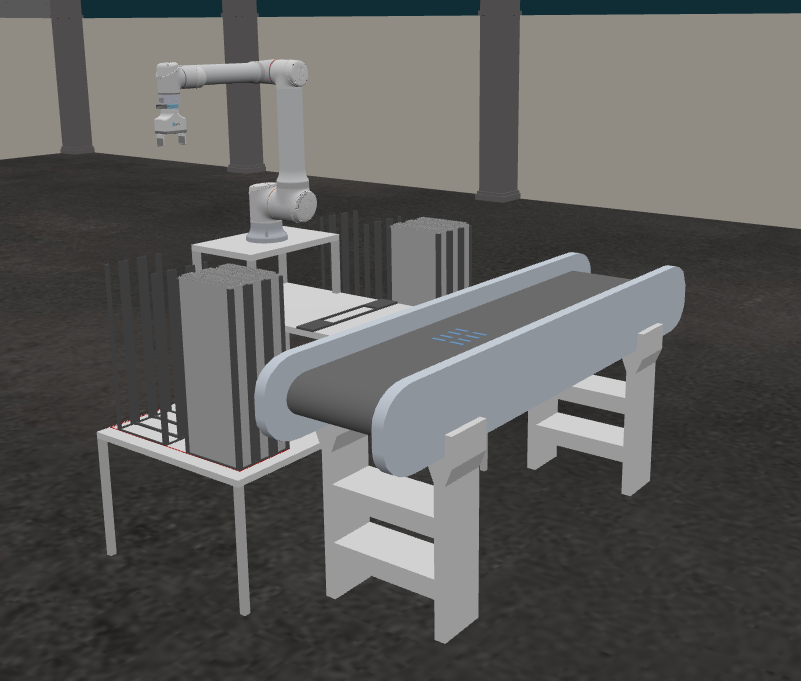
The proposed concept was straightforward: parts exit the injection machine, travel on a conveyor to a pick area, and a robot picks the parts and places them into blisters. Once a blister is filled, it is moved to an output area for an operator to remove.
What needed validation was equally clear: would the robot and handling sequence realistically match the machine pace?
What we simulated end-to-end
In this pilot, we didn’t simulate “robot motion only”. We built a functional process simulation that included the relevant subsystems and the logic linking them together:
Blister management (empty → fill → output)
We simulated the full blister lifecycle:
- An empty blister area (source)
- A fill position in front of the robot
- An output row where filled blisters would be placed to generate a batch for operator pickup
This is often where concepts break down in the real world — not because of the robot itself, but due to handling overhead and the “hidden time” of tray/blister logistics.
Robot model + gripper + real sequence timing
Our team:
- Modeled and imported an EC66 robot, from Elite Robots
- Imported the necessary assets (robot, station/table structure, blisters, workpieces, etc.)
- Modeled a gripper
- Implemented the robot sequences to estimate pick-and-place time, while validating:
- reachability
- collisions
- sequencing constraints
Two approaches studied and compared
To make the evaluation objective, we implemented and simulated two alternative strategies:
- Direct pick-and-place to blisters, then move filled blisters later
- Robot picks parts from the conveyor
- Places parts into a blister
- Later in the process, blisters are placed in the output area for operator removal
- Robot positions the empty blister first, then fills as parts arrive
- Robot picks an empty blister and positions it in front of itself
- Robot picks parts as they arrive and fills the blister
- Once filled, robot moves the blister to the output row and repeats
By simulating both flows end-to-end, we could compare not just “robot speed”, but total process behavior.
Results
The simulation quickly highlighted a critical reality:
- In both approaches, the robot cycle time was significantly above the required pace
- The best case scenario was still ~100% above the expected cycle time
In other words: the concept, as designed, would not follow the injection machine throughput and would create a bottleneck on the production line.
Even without going into full industrial commissioning detail, the simulation provided strong evidence to support an early decision: iterate the concept before building it physically.
What we validated early (and why it mattered)
Even at PoC scope, this simulation answered key engineering and decision-making questions early:
- Throughput feasibility: can the concept keep up with 8 parts every 20 seconds?
- Handling strategy impact: how much time is “lost” moving blisters vs. filling them?
- Cycle time estimation: what is the realistic timing once all steps are included (not only pick motion)?
- Reachability & collision risk: are we introducing constraints that slow down the sequence?
- Bottleneck identification: where does the process lose time and accumulate delays?
- Concept decision support: should the team redesign the flow, change the robot strategy, add buffering, or revisit the system architecture?
This helped FEHST Componentes decide quickly and confidently — before time and budget were committed to a concept that wouldn’t meet performance requirements.
Why simulation matters early
Simulation is not just a “nice-to-have”. It can be one of the most cost-effective steps in automation engineering because it helps teams identify:
- expected throughput
- bottlenecks
- reachability/collision issues
- sequencing risks
- concept feasibility
…before moving into a full-scale physical integration where changes become slow and expensive.
At Augmented Labs, we help clients and partners study their solutions early and validate what works — and what doesn’t — using ROBOTICA Studio.